
海コントレーラーが出入りする現場に面した道路は、大型同士のすれ違いすら困難なほど狭い道幅であることも珍しくありません。
このような狭路から幹線道路へ左折する場面では、乗用車のように単一の円弧で滑らかに曲がることは現実的に不可能であり、実際の運転操作は複数の段階に分かれた区分的な旋回となります。
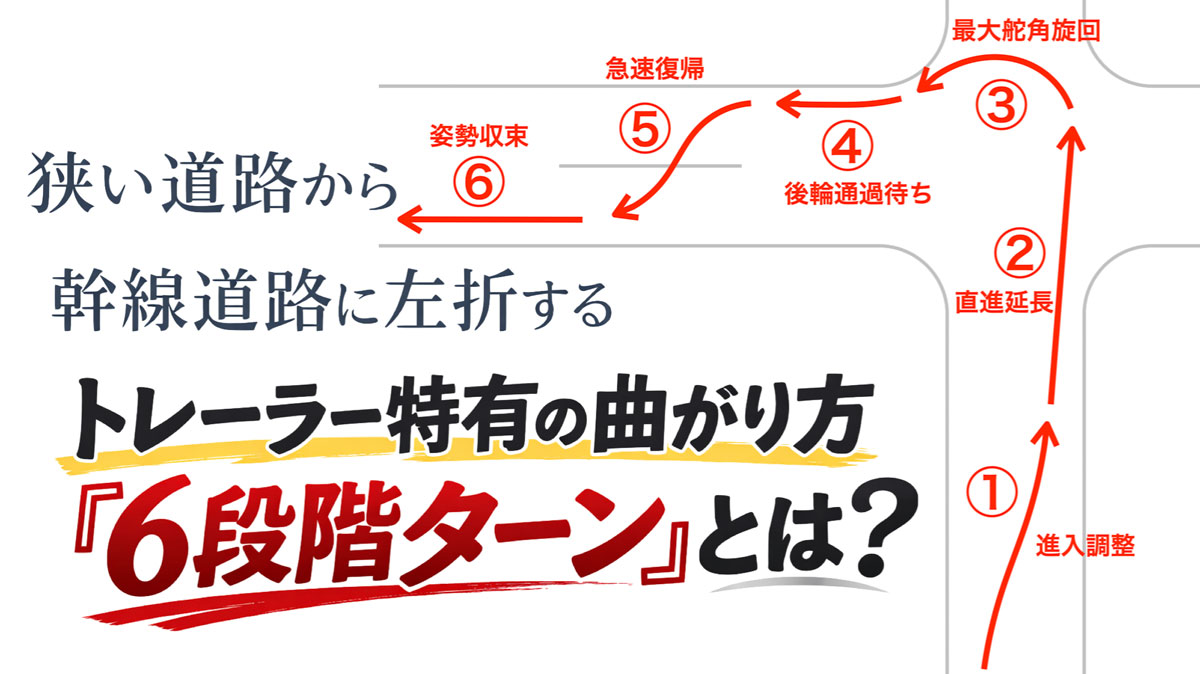
本記事では、この狭路左折における区分的な旋回挙動を『6段階ターン(Six-Stage Turn)』と定義し、その挙動を俯瞰シミュレーションとともに検証します。
また、そのような左折場面において、シャーシの軸数(2軸/3軸)によって挙動がどのように変わるのかについてもシミュレーションで比較しました。
なお、本シミュレーションは以下の条件としています。
・ヘッドの軌跡はシャーシ毎に2軸/3軸で完全に同一
・操舵条件、進入ラインも同一
・純粋に「シャーシの軸数差のみ」が軌跡に与える影響を観察可能
つまり、20ft/40ftではヘッドの軌跡は異なりますが、20ftの2軸と3軸ではヘッドの軌跡は完全同一、同様に40ftの2軸と3軸でもヘッドの軌跡は完全同一、ということになります。
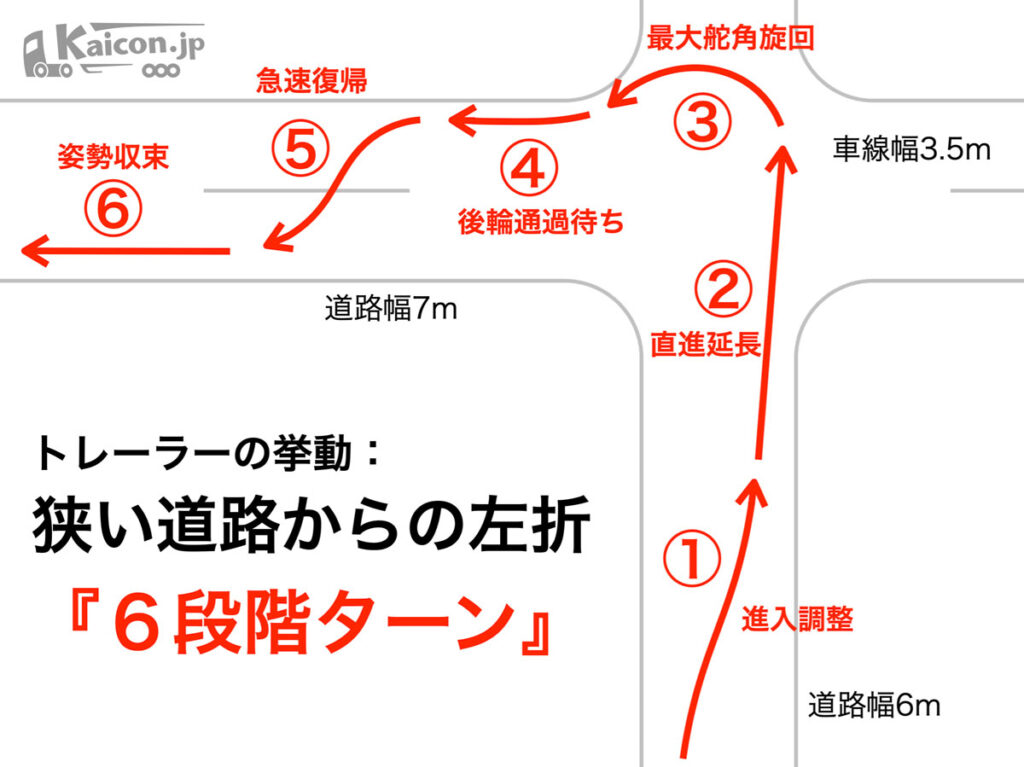
道路条件:
・南北道路:道幅6m
・東西道路:道幅7m(車線幅3.5m)
・交差点R:かなりきつい(よくある小R交差点を想定)
20ft・2軸
当初は南北道路をキープレフトで左折進入することを試みましたが、この道路条件では物理的に左折できませんでした。
そのため、交差点中央側に向けてヘッドを振るアプローチを取っています。
いわゆる「外振り量の確保」が必須となる事例であり、左側ベタ付け進入では内輪差を吸収できず、縁石乗り上げのリスクがあることがわかります。
20ft・3軸
ヘッドの軌跡は20ft/2軸と完全に同一です。
しかし、イン側(縁石側)の余裕がわずかに増えていることが確認できます。
これは3軸シャーシのキングピンから後軸中心までの距離が2軸より若干短くなっているためです。
結果として、同じ操舵・同じ進入ラインでも、内輪差に対する余裕が生まれています。
その分、運転操作的には
「左折後に自車線へ戻るタイミングをもっと早められる」
という余裕が生じることになります。
40ft・2軸
南北道路からのキープレフトでの進入では、そもそも左折が不可能でした。
そのため、かなり早い段階から右側へ寄せ、交差点中央を大きく回り込むラインを取っています。
40ftになると、ホイールベースとオーバーハングの影響により、
・内輪差の増大
・外振り量の増加
が顕著になります。
「直感よりもさらに外に振らないと曲がれない」典型的なケースです。
40ft・3軸
ヘッドの軌跡は40ft/2軸と完全に同一です。
そして、イン側縁石に対してかなりの余裕が生まれているのが分かります。
一方で注意点として、左折時の右リアオーバーハングが南北道路右側に対して非常にシビアになっています。
右へ寄りすぎると、後端の振り出しによる接触リスクが高まることがわかります。
つまり、
・内側余裕は増える(3軸の利点)
・外側クリアランスはより厳しくなる
というトレードオフが明確に現れています。
◇
トレーラーの左折は実は『6段階ターン』、ただの円弧ではありません
運転してる人にとっては身体に染み込んでる話ですが、俯瞰シミュレーションを見ると分かるように、海コントレーラーの狭路左折は、乗用車のように綺麗な円弧を描いて曲がっているわけではありません。
実際の操作は、感覚的には1回の左折でも、内部的には6段階に分かれた「多段フェーズドライビング」になっています。
以下は、その6段階の操作フェーズです。
① アプローチ右寄せ(進入条件の調整)
道路構造にもよりますが、まず進入時に適度に右へ寄ります。
ただし寄りすぎると右リアオーバーハングが接触するため、寄せ量は非常に繊細です。
ここが甘いと、後のフェーズでイン側を確実に引っ掛けます。
もちろん、広い交差点ならこの右寄せアプローチは不要です。
② 意図的な直進延長(後輪軌跡の余裕確保)
交差点に進入してもすぐに左折を開始せず、交差点を通り過ぎるほど直進します。
直進距離が不足すると、シャーシ後輪の進入角がきつくなり、イン側縁石に接触しやすくなります。
③ 最大舵角での旋回(限界旋回フェーズ)
ある地点まで進んだら、一気に前輪舵角を最大に使って旋回します。
狭路左折の場合、左折後のヘッド右前角が縁石やガードレールをなぞるようなライン取りになるのが理想です。
このフェーズが甘いと、物理的に曲がり切れなくなります。
④ 左折先右側トレース(後輪通過の保証)
左折後すぐに左側自車線へ戻るのではなく、あえて左折先の道路右側をなぞるようにヘッドを走らせます。
これにより、シャーシ後輪の内側軌跡が十分に抜ける余裕を確保します。
⑤ 速やかな自車線復帰(交通リスク管理)
ミラーでシャーシ後輪の通過を確認し、安全が確保できた時点で速やかに本来の左車線へ戻ります。
復帰が遅れると、たとえば信号待ちの対向車との衝突コースに入ってしまいます。
ここで停止線を大きく越えて信号待ちしてる対向車がいたりすると、曲がれなくなったりすることもありますので要注意です。
⑥ 姿勢収束と直進(旋回完了)
ここでようやく折れ角が収束し、通常の直進状態に戻ります。
連結車両の場合、ヘッドが曲がり終えてもシャーシ挙動が完全に安定するまで時間差があるため、この段階が実質的な「左折完了」と言えます。
◇
まとめ
ヘッドの軌跡を完全に同一にした状態で、シャーシのみを2軸/3軸で切り替えて比較する、これは実車では事実上不可能な検証です。
さらに、俯瞰視点で後輪軌跡や内輪差、オーバーハング挙動を同時に観察できる点も、シミュレーションならではの大きな利点と言えます。
また、俯瞰軌跡を見ると明らかな通り、海コントレーラーの狭路左折は乗用車のような単一円弧では成立せず、
①進入調整
②直進延長
③最大舵角旋回
④後輪通過待ち
⑤急速復帰
⑥姿勢収束
といった多段フェーズの操作として実行されています。
特に難易度が高いのは、直進延長(フェーズ②)から最大舵角旋回(フェーズ③)へ移行するタイミングの見極めです。
早すぎればシャーシ後輪がイン側に引っ掛かり、遅すぎれば最小旋回半径の制約により物理的に曲がり切れなくなります。
すなわち、実務上は「ここでフルロックまでハンドルを回せばギリで曲がれる」という臨界的な旋回開始地点の判断が求められます。
したがって、狭小現場から幹線道路へ左折で進出する場面においては、「円弧で曲がる」という発想ではなく、車両全体の軌跡を予測しながら多段フェーズでそれぞれの姿勢を作っていくことこそが、接触回避と安全確保の鍵になると言えるでしょう。
関連記事
投稿日: 2025年5月17日

初心者が最初に覚えるべき、海コントレーラーの左折マニュアル
投稿日: 2026年2月14日
